
If you have read my review for the iOptron ZEQ25, you might remember that I was very happy with the mount. You might also remember I had mentioned there was an updated version called the CEM25, which was the same mechanically, but had updated electronics & stepper instead of servo motors. Well, a month ago I gave in and ordered the CEM25 from the UK distributor, Altair Astro. What I received though, was this:

Enter the CEM25 update, unannounced at the time I received it, the CEM25P. Apart from the “P” in the logo, you can tell it apart from the CEM25 by the bolt handles which don’t have the central white dot.
What’s new
The differences between the ZEQ25 and the original CEM25 were:
- Stepper motors instead of servo motors. This means silent operation, no over-current issues, faster slewing (6°/s), but a bit more power consumption when tracking (0.35A vs 0.2A).
- New electronics board. This means compatibility with the newer iOptron ASCOM drivers, and some extra features like manual corrections for PEC (still no PPEC).
Upon receiving the CEM25P I wrote to iOptron asking what that “P” is there for. According to them:
- Periodic error < +/-10 arcsec per worm period.
- The new screws use stainless steel bolts instead of black steel bolt. The bond between the handles and bolt also has been improved.
Very interesting. While under +/-10 arcsec PE (so 20 arcsec Peak to Peak) is not earth-shattering, in the sense that there were many ZEQ25 and CEM25 units that performed within that spec, it was never guaranteed, so if you were unlucky you could get something with more PE. It is more impressive if you compare it with most Celestron and Skywatcher mounts which normally have quite a bit more PE than that. So, if iOptron can deliver in that front (well they guarantee it, so you’d just have grounds for a return otherwise), it will be significant.
A quick rundown of the CEM25P specs:
| Payload | 27 lb (12.3kg), excluding counterweight |
| Mount weight | 10.4 lb (4.7kg) |
| Periodic Error | < +/- 10 arc seconds |
| Resolution | 0.14 arc seconds |
| Latitude adjustment range | 0º ~ 60º |
| GPS | Internal 32-channel GPS |
| Polar Scope | AccuAlignTM dark field illuminated |
| Hand Controller | Go2Nova® 8408 with 150,000+ objects database |
| PEC | Yes (not permanent) |
| Speed | 1×,2×,8×,16×,64×,128×,256×,512×,MAX(6º/sec) |
| Tripod | 1.5″ Stainless Steel(5kg), optional 2″(8kg) |
| Power consumption | 0.35A(Tracking), 0.6A(GOTO) |
| AC adapter | 100V ~ 240V (included in US – car adapter for UK) |
| Ports | Serial (ASCOM drivers available), ST4 |
| Price | $948 (US) / £799 (UK) |
External differences
After assembling the new mount, I immediately noticed that the ZEQ25 saddle issue that was a danger to your OTA if you were not careful is now gone:
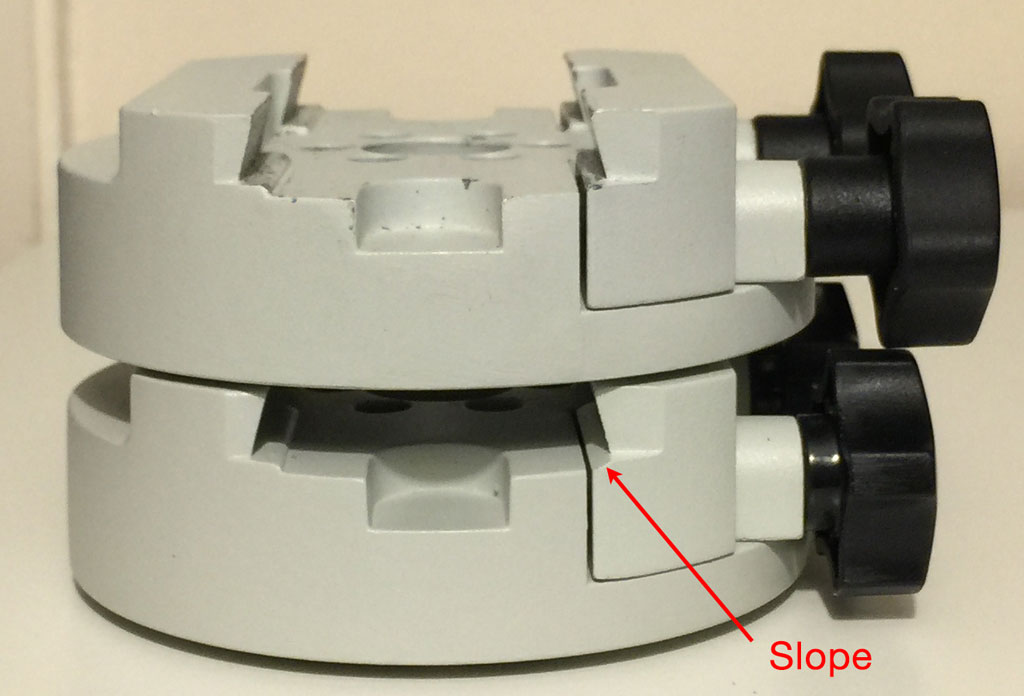
ZEQ25 top, CEM25P bottom
They increased the slope the same way that users would often manually do by filing the ZEQ25 saddle if they didn’t want their dovetail to get caught at the wrong edge. So that’s great, but what is not so great are the new stainless steel knobs. The “stainless steel” part is welcome of course, as is the “improved bond between handle and bolt”, but the handles themselves were much more substantial on the ZEQ25, as well as rounded and somewhat soft, which made them very nice to handle in freezing temperatures. The new handles are simply not comfortable, especially in cold weather without gloves, and they look a bit like cost-cutting to me, especially if I also look at the altitude adjustment bolts:
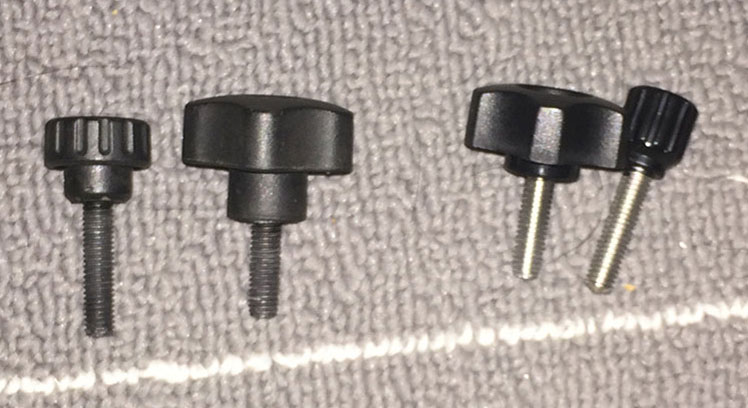
ZEQ25 left, CEM25P right – big bolts are CW bar and saddle bolts, small are azimuth adjustment
As I said, stainless steel instead of blackened steel is good, but the handles do seem like a step back. At least, replacing the azimuth adjustment ones is easy. On the other hand, as with the ZEQ25 the altitude adjustment is smooth and easy.
Also, another bad thing I noticed is that the bolts that hold the CW bar on the CEM25P and, the small allen bolts that fix the saddle on the DEC axis (I removed the saddle to install the ADM one that I recommend) don’t screw/unscrew smoothly, like the threads are not perfect, which makes me wonder if there are some other corners cut in the mechanical quality. I don’t know if I am reading too much (or too little) into this, but I also note that, for example, the iOptron logo is a bit faded (see next image) and the hand controller’s back is not very straight on the top and leaves a bit of a gap, so you can see light leaking out from the side:

Left: Gold “iOptron” a bit faded. Right: CEM25P hand controller leaking light.
It is possible these were only on my unit (which is one of the first in production as I understand) and/or might not mean much, but they are things I immediately noticed and I though I should report.
Oh, and one small WTF thing. Apart from changing the lettering from nice high-contrast white to a lower contrast gold, they moved the labels of the ports from the side, where you could, say, read them, to the TOP. You have to rotate the RA out of zero position to read the labels. I can’t imagine why!
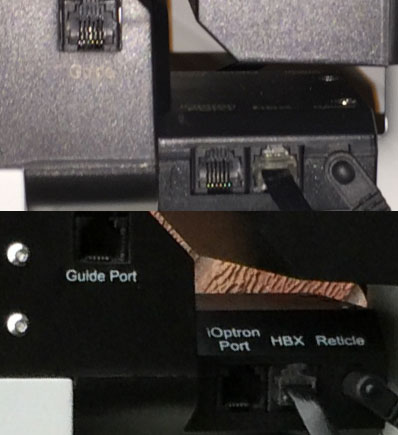
CEM25P on top, with the lettering barely visible.
Using the mount
If you are looking for an insightful review about how the CEM25P compares to traditional german equatorial mounts, please refer to my detailed ZEQ25 review, as the two mounts are the same in all the aspects that matter in comparison to such a “traditional” mount. Here, I only focus on the differences of the CEM25P from the ZEQ25.
One important change that might catch ZEQ25 users off-guard has to do with zero position. Unlike the older mount, it is not set at the point where the mount is where you switch it off. Instead, you set it wherever you want. So, be careful, do not use “go to zero position” before having actually set the zero position! This behavior is actually better when you get used to it, as losing power to your mount no longer means it forgets its last position.
Another change is the tensions screws. They are now “simplified” (although I never really found them complicated to use), in that you just screw them in completely and if you hear a bit of grinding sound (which is harmless, the manual assures as), then you loosen by half a turn or so. Indeed on my first slewing I could hear a sound, as you can see from this video where I compare it to the ZEQ25:

You can see the difference the stepper motors make, almost silent (well after I loosened the tension screw) and at least a 33% increase in maximum slewing speed. The ZEQ25 at 4.5°/s was already faster slewing than most mounts in its category (e.g. 3°/s for the HEQ5/Sirius, 4.2°/s for the AZ-EQ5/Sirius Pro), the CEM25P goes to 6°/s. The new motors also don’t have the “over-current” problem some ZEQ25 users reported (no sure what it was, I never had it). Unfortunately, the amazingly low 0.2A tracking consumption goes up to 0.35A, which is still low compared to other mounts.
An often noted issue of the ZEQ25 hand controller was the low key responsiveness. I am happy to report that this is fixed and the keys are perfectly responsive. You also get some new features, like setting the tracking rate (including the “King” rate which accounts for atmospheric refraction for better unguided) and manual guiding for PEC recording (which is not as useful as it sounds, as the PEC is still not permanent). There where two changes that I did not like: First, if you select “sync to target” you can’t just sync to your previous goto, but you have to first select a go to target (and instead of at least auto-selecting your previous one it just arbitrarily takes you to the planets menu). Secondly, wherever you are on an editable field, your cursor starts at the rightmost digit. So if you want to go to NGC 2244, you select the NGC catalog, press 3 times “left” to go to the first digit and then type 2244. It makes zero sense, but that’s the current firmware 🙂 At least the keypad is responsive so you can actually do those key-presses fast.
An other common issue with the ZEQ25, the slow lock of the GPS, has not been addressed. You still have to turn the RA 90° either side so that the GPS has better access to the skies, and wait a few minutes (2? 3?) for the lock. Still, other companies don’t put GPS on their mounts as standard, so leaving the mount a few minutes to get a lock while you are moving/organizing the rest of your gear is not much trouble.
After noticing these differences, the CEM25P is quite familiar to the ZEQ25 user and quite pleasant. Maybe more pleasant in fact, as while I remember the ZEQ25 having almost no backlash, I don’t think it had exactly zero like the CEM25P seems to have – maybe it is also the increased key responsiveness, but clicking to move around seems more “immediate” than with the older mount. I haven’t yet loaded it to its limit to see if it handles as well as the ZEQ25, but so far so good.
Hooking it up to a PC was the same in hardware (you are given a Serial cable, you use your own Serial-to-usb adapter), but very different in software. You see, the ZEQ25 had a very rudimentary ASCOM driver. It would connect you to PHD2, or APT, or whatever program you wanted, but it didn’t really do anything itself – just some directional keys and a coordinate display. The CEM25P driver has a “proper” panel giving you full data and full control of the mount (including goto databases), so you can actually do things with it without relying on other software.
AP Performance
As with the ZEQ25, the CEM25P comes with a high-precision polar scope, which you can use with an app (Polar Scope Align is, of course, the best) for a quick and accurate polar alignment. Unlike my ZEQ25, the CEM25P came with the polar scope correctly aligned to the RA axis, exactly as it should. The good polar scope and relatively low Periodic Error of most ZEQ25 mounts made it an excellent solution for unguided astrophotography, and CEM25P’s promise of a very low PE goes even further. Hence, PE is one thing that should definitely be tested. One way to do it is using a PHD2 guiding log where you have disabled PHD’s guiding output, so that it only records without correcting. Leave it for at least 5 worm gear periods – i.e. 598s x 5 for the CEM25P’s 144-tooth gear – if you want detailed analysis after processing with PECprep. Because I only had 2 nights for imaging in the last month, I did not spend the 50 minutes for a complete analysis, so with under 2 cycles I did not try to identify and remove non periodic errors (turbulence etc), which means the PE might be over-reported:
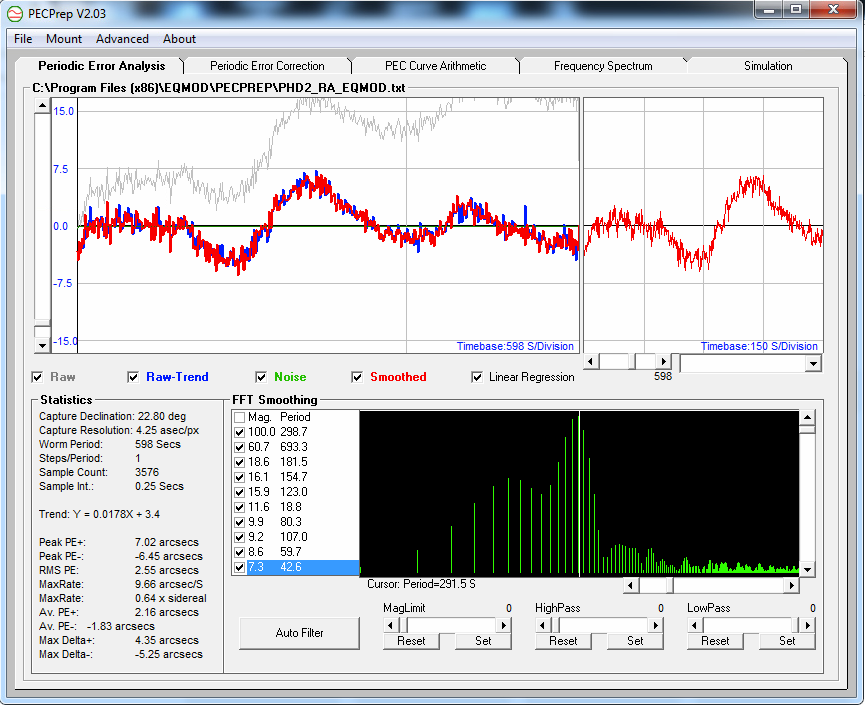
Still, it is indeed well under +/-10 arcsec. I’ll do a longer run in the future with a longer focal length to do a better analysis and isolate the true PE, but at least my CEM25P seems to pass this test with flying colors right from the factory. I have seen better graphs from ZEQ25s after tuning, but I don’t think they were often that good out of the factory.
As nice as the CEM25P is for unguided, most people will probably use it for guided exposures. My first proper session went a bit like this:
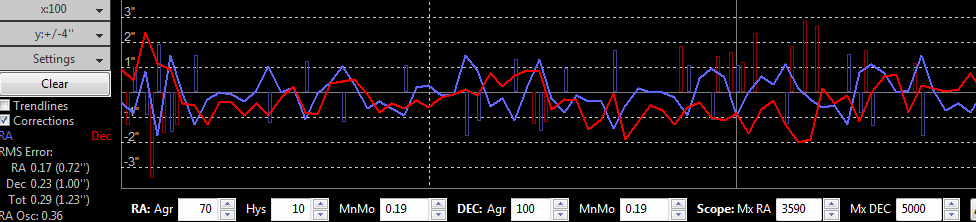
Not bad, although while RA stays always well under 1″ RMS, DEC guides a bit worse, perhaps some tuning there might be helpful. I also had the exposure at 0.2s, might have been a bit low for the night and had the guiding go after seeing too much. But overall the result was quite pleasing:

Soul Nebula, 12x5m, Equinox 80 ED, Canon 600D FS /w CLS
Conclusion
I haven’t had enough experience with the mount yet (UK winter…), for example I haven’t tried it with the (a bit obscene for such a tiny mount) C9.25, but so far it seems that the excellent ZEQ25 was improved. In fact, if you consider that my ZEQ25 required a bit of tuning to get it to where I wanted it, the out-of-the-box experience of the CEM25P is indeed superior. There are a couple of small areas where there seems to be a retrogression compared to the ZEQ25, but the positives are way more. So, one of the most portable and capable astrophotography mounts seems to be even better. I will make sure to try the C9.25 on it and see if I can get some decent results like I could with the ZEQ25. But for now a recap of advantages and disadvantages over the ZEQ25:
Advantages over the ZEQ25:
- Silent, faster slewing motors.
- Lower PE (guaranteed < +/-10 arcsec).
- Fixed saddle “catching” issue.
- HC: Fixed keypad responsiveness, added features.
- Much better ASCOM driver.
Disadvantages:
- A bit higher power consumption (still low).
- Knob handles harder and with non smooth edges.
- “Sync to target” requires extra go-to, cursor starts on the rightmost character in editable fields.
- Small issues like hand controller back a bit crooked, saddle and CW screws don’t screw smoothly.
ZEQ25 weaknesses that were not addressed:
- GPS lock takes time.
- PEC not permanent.
For more information about available accessories, help videos etc, see my ZEQ25 review.
Another very helpful review for this prospective CEM25 buyer. I’m thinking of getting the EC version, even though I plan to guide eventually. My thought is that the better quality native tracking will make the guiding that much easier/better. Is that logical? I’m way new to this stuff. Thanks, and thanks for the review!
Hi Frank. The EC version will not help at all in guiding, you will only see a benefit in unguided astrophotography (requiring very precise polar alignment). Also, the CEM25P version promises a very low Periodic Error (what EC tries to eliminate), so theoretically with a 540mm scope like the NP101 you are talking about the EC should not really make much of a difference to your results (but guiding will).
I am also considering buying a CEM25P to use for guided AP with my 80mm f/6.25 frac.
Do you think the mount would cope with my 130mm f/7 triplet for visual use only as it weighs about 12kg?
Thanks,
M
Hmm, that’s right up to the mount limit, plus it is a longish OTA which makes it even harder, so I can’t be sure. If you want to try it, the ADM saddle will help, and also the heavier 2″ tripod should make a difference (but makes the mount less portable).
I used my previous ZEQ25 with my previous ES 152 achromat, actually just testing if it could handle it and it did for visual use. I had the 2″ leg tripod model.
Hi, I am wondering if you can help.
I am new to astronomy I have recently purchased a sky watcher 130/900 EQ2. I do not have a polar scope. But download app to help me polar align my scope as Polaris is not visible from my back garden. All help will be great full
Hello. Polar scope align pro had a “day alignment” feature that can help get rough polar alignment if you use it correctly with some DIY construction like what is shown here. The only way to get more precise polar alignment is with the drift alignment process, which can be a bit hard and lengthy process (although if you have a camera for the telescope the program Sharpcap will help you with the process).
Hello!
Thank you, very helpful review!
Please, what do you think, for a 360mm refractor, would I need guiding with CEM25P? And if yes, what about the EC version?
I’m trying to find a way to do astrophotography without guiding wih such a short telescope.
Thank you!
Well, it is not a matter of “needing” guiding. Guiding gets you from reasonably long exposures for a scope of 360mm f.l., to very long exposures. I’ve never tried the EC, however it is supposed to allow you to go for max possible unguided, but precision polar alignment is crucial for it. It is quite expensive. Perhaps a better investment would be something like the synguider, along with a small guide-scope, which would provide computer-free guiding. The synguider is also something I haven’t tried so I can’t comment on it further. Sorry I can’t help more!
Very nice comments and nice write up about the CEM25P!
Do you already have some more experience with this mount? I just bought the CEM25P (June 2018) So I’m hoping you can give me some more examples of astrophoto’s taken with this mount! (Link to Astrobin perhaps???)
Thanks in advance,
Rutger Bus
Photographic Moments
http://www.rutgerbus.nl
Hi Rutger. I don’t use Astrobin and in any case I haven’t done much DSO astrophotography recently – combination of a new job and being in Manchester, plus during the summer when I have free time I am usually abroad, so I use different equipment. Hence I don’t have near as much experience with the CEM25P as I had with the ZEQ25. Hope you get to use yours a lot!
Just wondering if you ever got the chance to try the C9.25 on this mount?
Hi. I’ve tried it a few times, with the ADM saddle that I have, it usable but pretty much at its limit.
Have had CEM25P for 3 years and recently replaced tripod with Berlebach ash Record. Mount performance much improved. Also use pole master for accurate polar alignment – well worthwhile. Tracking was always good but the new tripod and polar alignment system have improved GoTo capability significantly. One issue remains to be addressed – sloppiness in the mount which frustrates hand focusing. I use two scopes ; a small Takahashi refractor equipped with Peagsus electric focuser which works well, and an Orion Optics OMC140 which uses micrometer thumbwheel to focus with the mirror and has an inevitable hand induced vibration. Still trying to resolve this one!
I assume you had the CEM25P originally with the 1.5″ tripod? The reason I liked it was its portability over its stability, I can see how stability could be improved, how was it price-wise? As for the pole master, personally I found the polar scope perfectly adequate for quick and accurate polar alignment and I am annoyed that iOptron now has replaced it with their iPolar which basically requires a laptop.